近日,东南大学电子科学与工程学院吴俊教授课题组在国际著名学术期刊《advanced materials》在线发表标题为《基于mof 和石墨的捕蝇草启发的无数据中心快速响应软体机器人》(“venus flytrap-inspired data-center-free fast responsive soft robots enabled by 2d ni3(hitp)2 mof and graphite”)的最新研究成果。
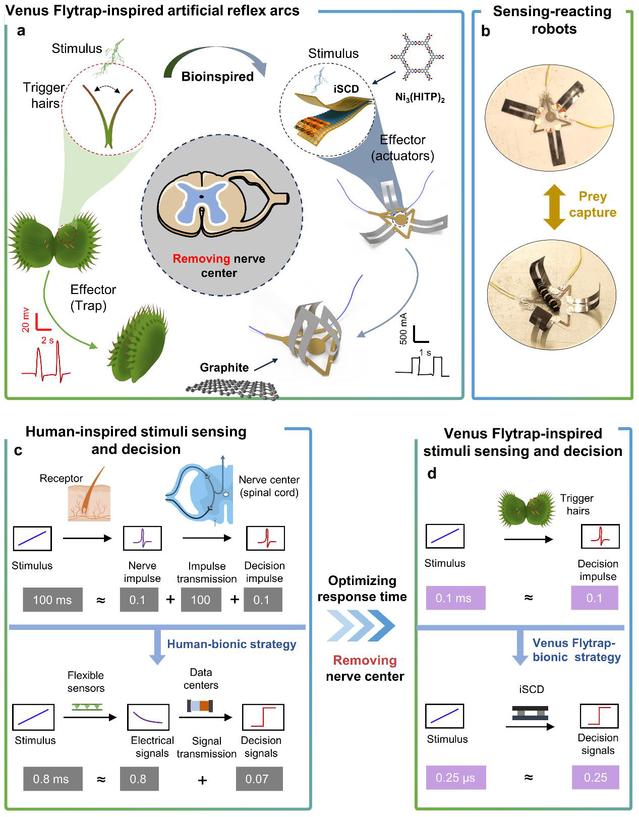
软体机器人在感知、评估和应对环境刺激方面的快速反应能力非常重要。然而,现有的许多模仿人类和其他高等动物设计的软体机器人通常依赖数据中心来调节机械电子传导和机电驱动。这种依赖大大增加了系统的复杂性和时间延迟。在此,我们受捕蝇器刺激感知-致动机理启发,提出了一种软体机器人,它采用功率调制策略进行主动刺激反应,无需数据中心进行数据处理与指令传达。该机器人通过超低时延的 2d mof 实现机电转换,并通过石墨实现机电驱动。在压力施加后,ni3(hitp)2可有效调节石墨中的焦耳热效应,从而实现软机器人的刺激反应。这种功率调制策略可启发边缘智能软机器人,和具备类似人类的条件反射和非条件反射有效融合的高级机器人的设计。
该论文第一作者为东南大学电子科学与工程学院博士生段升顺,东南大学吴俊教授和北京理工大学沈国震教授为共同通讯作者,电子科学与工程学院孙立涛教授和石琼锋教授参与该工作指导。该研究得到了国家自然科学基金委面上项目和博士生项目、国家重点研发计划和东南大学科研启动资金的资助。
文章链接:https://doi.org/10.1002/adma.202313089
来源:电子科学与工程学院