近日,东南大学智能材料研究院院长、首席科学家、化学化工学院李全教授团队在微型胶体机器人的组装和操控方面取得重要突破。相关成果以“colloidal tubular microrobots for cargo transport and compression”为题,在《美国科学院院刊》 (proceedings of the national academy of sciences of the united states of america,pnas)上在线发表。东南大学博士生王小雨为第一作者,李全院士和青年教师杨涛为共同通讯作者。
微纳机器人是指能在微纳尺度下实现可控驱动和感知,最终实现体内药物递送和疾病治疗的复杂体系。受自然界蜂群鱼群等启发,微型机器人集群凭借其协同推进,递送和信号传输模式而受到越来越多的关注。外场响应性胶体作为新型的微型机器人体系,其动态组装可作为机器人集群的有效手段。然而目前已有的胶体机器人组装结构仅限于密集的胶粒团聚体,大大限制了其功能性。如何构建复杂的胶体组装结构功能体系,建立相应的构效关系是一个亟需突破的挑战。
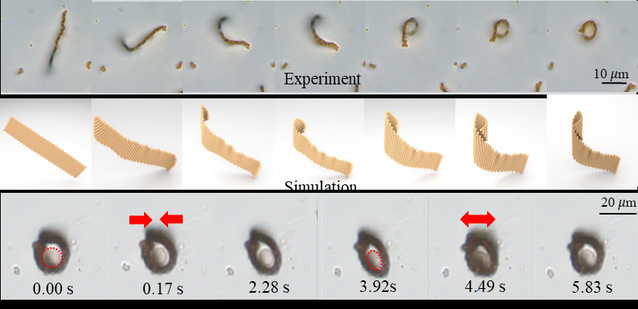
李全团队提出了一种介稳态的胶体结构组装方法,通过组装路径设计,首次实现了由超顺磁性胶体微球组装成复杂的三维空心管状结构。该方法适用范围广,能实现从200纳米到30微米超顺磁性胶粒在包括血液在内的非牛顿流体内的多次反复组装。组装的微管机器人可以通过外部磁场精确控制三维趋向,推进方向和速度,内部的中空空间使这些管状微型机器人能够根据指令抓取、运输和释放货物。此外,两个微管机器人能沿轴向合并,重组成新的机器人。相比于其他组装结构,微管机器人的介稳结构可以维持其径向反复压缩,因此可用作微镊子对内部红细胞等柔性货物进行挤压,实现对目标物体的原位探测。该工作为复杂胶体组装和微型机器人操控等提供了新思路。
该研究工作得到了江苏省“双创团队”、江苏省自然科学基金等项目的资助。
论文链接:
供稿:化学化工学院